图1 系统构成方案原理图
刘国生,陶 明,王小锋,刘烈晖,袁子豪
(中交广州航道局有限公司,广东 广州 510300)
摘要:为在保障和加强施工船舶安全生产监督力度、提高设备完好率、构建企业长效事故预警和远程在线专家故障诊断分析机制等方面提供技术支持,研发“工程船舶安全状态在线监测系统”。该系统以在线共享企业现场船舶工况数据为基础,综合运用现代传感器、自动化及仪器仪表、网络通信和计算机等工业成熟技术和工艺,由岸基中心监控服务器、无线移动网络及系统通信协议和各工程船工况数据智能采集装置等部分构成。该系统可使岸基中心监控服务器通过移动通信网络锁定跟踪公司每艘工程船,及时捕获可能发生的任何异常事件,发布事件信息。研究结果表明,该系统对工程船安全生产监督、船机设备及施工现场监管等具有很好的作用。
关键词:疏浚施工;传感器;无线通信链路;在线故障诊断;地理信息系统
随着生产经营规模的扩大,疏浚公司的工程船队(群)正在不断发展壮大,这些工程船遍布世界各地的海上施工区域,在复杂的工况及环境下,需保证设备运转时间,以尽可能地提高单船产能。因此,如何有效管理公司船队(群),加强施工生产安全监督,减少或避免海上机损事故,建立事故预警长效机制,是新时期值得疏浚公司重视的课题。
国外对此非常重视,早在2006年日本东亚建设公司就应用传感器、计算机和无线通信等技术研制“工程船拖航安全监视系统”,在非自航疏浚工程船长距离无人调遣拖航过程中,为岸基人员提供即时的调遣船状态信息,监视船舶的航行安全状况。
本文以国内的疏浚工程船为系统研发对象,基于先进的工业技术及工艺,创新思路,突破传统的安全监督报警方式,升级改造现有疏浚工程船老旧的安全监测报警装置,构建岸基-船-船间现场工况数据及报警参数交互通信网络,提供系统化、自动化或智能化的工程船安全生产在线监测方案。
目前在海上从事疏浚施工作业的工程船所配置的安全监测报警装置主要有舱底漏水报警装置、火警及烟雾感测装置和主机设备重要部位参数(如温度、压力等)监测装置,一些船上安装报警监控系统(Alarm Monitoring System,AMS)及用于指导船舶避让的电子海图系统。然而,许多老旧工程船的安全监测报警装置存在一系列问题,包括:功能单一,智能化或自动化程度较低,装置或设备间基本上是独立运行的,只能关注较少的或孤立不相关的安全参数;没有对船体空间姿态临界危险参数进行监测;存在事故判断延迟、报警准确率低等问题;主要以声和光的方式发出告警提示,报警原因信息不全面;没有施工设备运行工况趋势分析及事件诊断评估功能,即事故预测预报功能不强;监测装置本身无故障自我诊断能力,不具备第三方对本船装置的状态进行监督的功能;报警信息不能同步向岸基有关部门和同施工区域的同公司其他船舶发布,因此无法快速获得后方专家的在线技术支持;未与企业网络互联,无法共享现场实时数据资源。
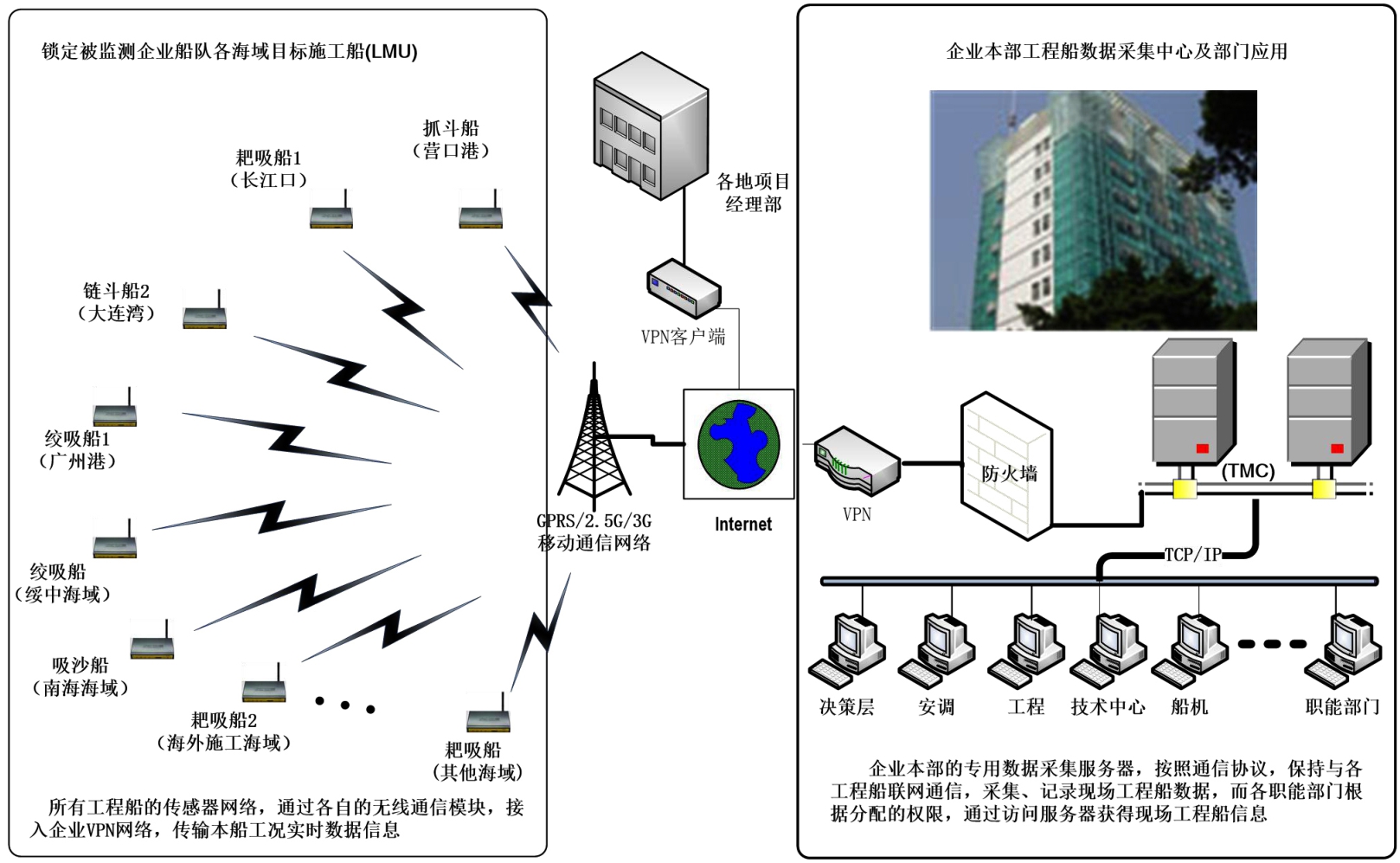
“工程船舶安全状态在线监测系统”是一个网络化的船舶安全监测方案,综合运用现代传感器、自动化及仪器仪表、网络通信和工控计算机等成熟工业技术和工艺,由“岸基监控中心(应用TMC远程监测软件,下文简称‘TMC’)” 、无线移动网络及系统通信协议和各工程船上配置的“工况数据智能采集装置(应用LMU嵌入式计算机数据采集分析软件,下文简称‘LMU’)”等3部分构成。TMC通过由无线移动通信设备及系统通信协议构成的WLAN链路,锁定跟踪企业船队所有工程船的LMU,遥测各船的工况信息数据,建立共享实时工程数据库,捕获船队可能发生的异常事件,及时向企业有关部门发布事件信息。LMU则负责全天候采集和记录现场工况信息数据,应用基于快速诊断算法的在线工况数据分析,获取本船发生异常事件时的特征参数,当发现异常情况时,立即向本船、TMC和指定对象发布报警信息,实现快速异常事件响应处理。
通过在本船LMU和异地TMC对船舶工况数据进行在线分析处理,实现本船和TMC同时对本船安全状态的实时监测。另外,该系统还可对自身的工作状态进行诊断监测,及时发现自身可能出现的问题或故障,保证系统的有效性。
该系统以在线共享企业现场船舶工况数据为基础,可在保障和加强施工船舶安全生产监督力度、提高设备完好率、建立企业长效事故预警和远程在线专家故障诊断分析机制等方面发挥技术支撑作用,是解决海上工程船生产安全监测报警问题的方案之一(见图1)。
LMU装置主要承担传感器群数据采集与记录、现场异常事件快速诊断分析和事故预警与发布等功能。由传感器群及控制总线构成的现场实时测量网络是LMU最基础的设备,在线采集、存储能客观反映挖泥船当前生产安全状态的关键物理量数据,由嵌入式计算机对这些数据进行快速诊断分析处理,给出该船此时状况的评估信息及LMU自身运行状态是否良好的自我诊断信息。LMU具有较高的自动化和智能化水平,独立运行,尽可能减少或避免人为干预和现场环境对监测结果的影响。LMU与该船有着相同的工作寿命,且全天24h不间断运行。LMU构成见图2。
图1 系统构成方案原理图
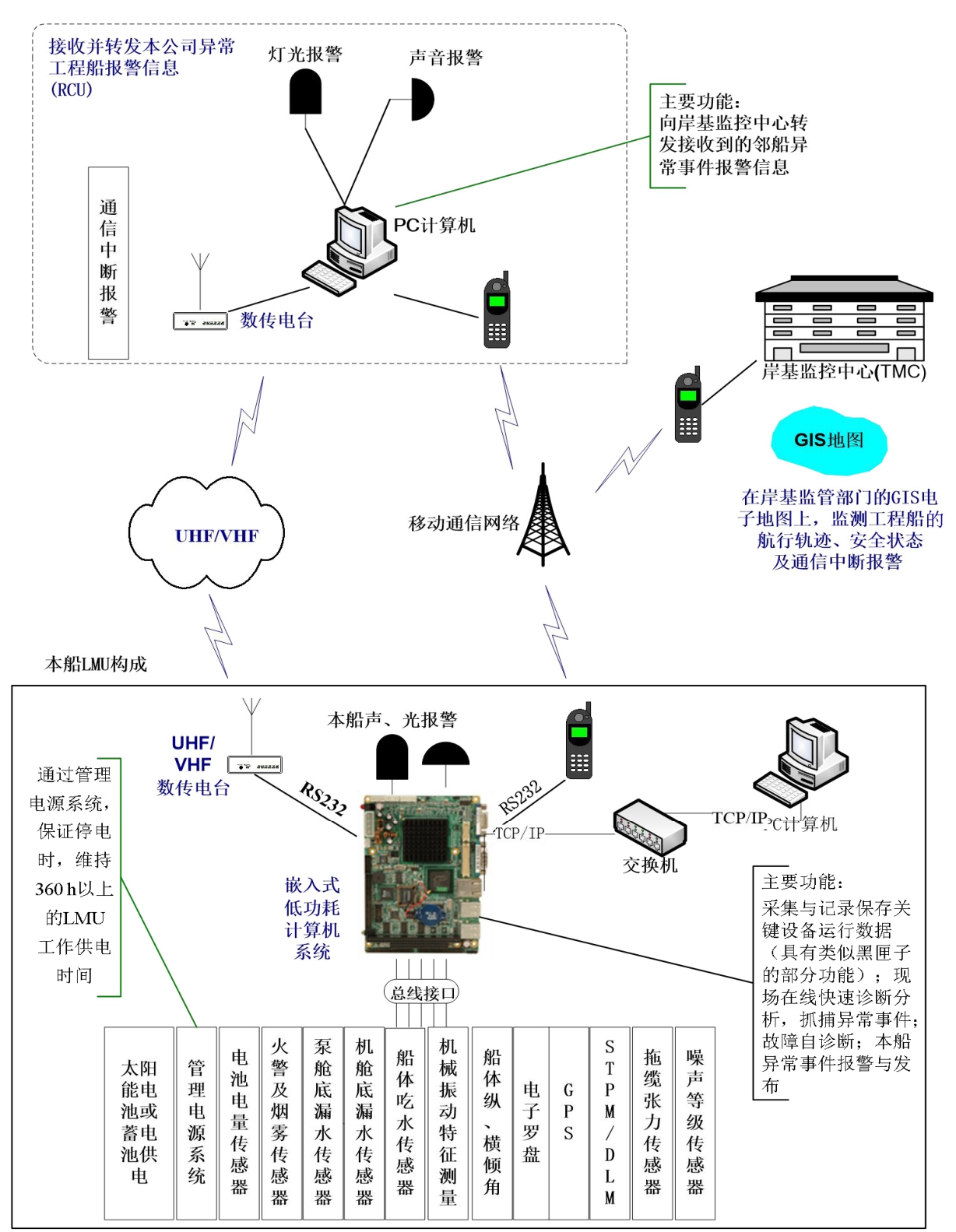
图2 系统设备构成及说明示意
3.1.1 传感器群数据采集与记录
针对疏浚类工程船的特征,目前可通过传感器获得涉及船舶安全的物理数据(或理解为可获得的该船基本生命特征参数),主要包括:船位空间坐标、耙头坐标、耙管姿态、桥梁角度、船体吃水线及排水量、船体倾斜姿态、船首方向、对地航速、舱底漏水状态、泥舱装舱舱位(或舱容)、机械量振动频谱、舱内噪声(声响)等级、舱内温度、火警及烟雾、拖缆张力(当拖带非自航船时)、风速、风向、涌浪和主机参数(包括:油温、水温、轴温、排温、压差、润滑状态、主轴振动频谱和扭矩等)等。每艘船根据自身具体情况及设计要求,从中选择所需的被监测物理数据,据此在该船上布置和安装相应的传感器总线网络及配套设备。LMU包含一个低功耗嵌入式工控计算机,控制采集传感器设备输出的数据信息。
LMU兼有黑匣子的部分数据记录功能:其存储器始终刷新纪录最近一段时间内的本船传感器数据、异常事件点和系统通信中断前后一段时间内的状态数据信息;同时,具有事故事件发生前后数据记录的回放功能。LMU独立供电工作,具有低功耗的性能。通过管理电源系统,保证船电中断时 LMU仍能维持360h以上的工作时间。
3.1.2 现场异常事件快速诊断分析
LMU对船舶工况数据的动态变化过程进行在线快速算法分析,根据故障诊断策略获取该船可能发生的异常事件。基本思路是:
1) 船体空间姿态的计算分析。可根据船体倾斜、吃水线、排水量(或舱容)、泥舱泥浆液位及装载量(针对耙吸式挖泥船)和全球定位系统(Global Positioning System,GPS)坐标等方面的传感器,测量计算船体的倾斜度及倾斜度变化率、吃水线及吃水线变化率,判断船体水面姿态参数的数值是否接近或超出预先设定的危险窗口值,同时给出这些参数的变化趋势,提前给出当前该船安全程度等级的评估报告,以尽可能早地捕获可能发生沉船事故的征兆。
2) 应用FFT算法对机械类设备关键部位振动信号的频谱进行诊断分析(见图3),获取船机类故障隐患。例如:将传感器当前输出的主轴承旋转振动信号的频谱特征值与参考基准值相比对,了解其磨损程度及特性衰退趋势;通过与机体振动信号的参考基准值相比对,抓捕机体安装基座螺丝松脱现象等。另外,若检测到船体突然产生强烈的振动信号,或机舱、泵舱内产生巨大的峰值声响,将作为受到严重撞击或冲击事件处理。
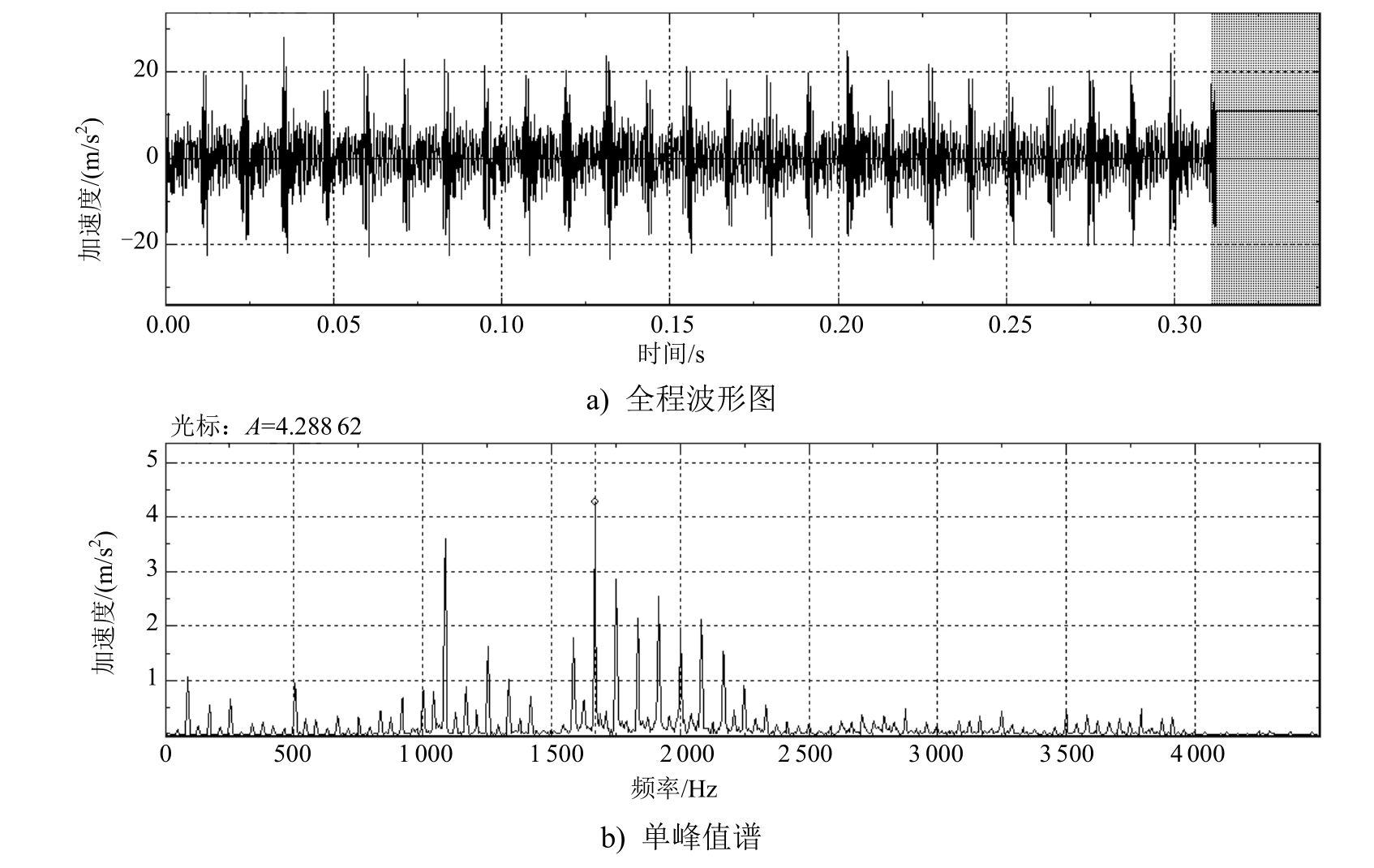
图3 振动与噪声信号分析波形
3) 通过对监测点的温度、压力等工程变量的变化趋势和变化速率进行检测和计算,在该监测值达到临界报警值之前发出预警信息,提醒人们注意。
4) LMU在监测船舶状态的同时,对自身的工作状态进行诊断分析,例如:某传感器故障或断线、与TMC通信链路中断、LMU装置故障及供电电源异常等,及时发现自身可能产生的故障,立即报警处理,从而保证系统的有效性。
5) LMU解决传统方式对船舶状态了解的滞后性和片面性。通过对被检测参数进行诊断分析,对其变化趋势进行动态评估,尽可能早地发现和预测船舶安全事故现象,提前采取措施,防止问题进一步扩大;同时,为事故发生后分析原因及责任和制订整改措施提供原始数据信息的回放、查询。
6) 不论该工程船处于何种状态(如:施工作业、调遣航行、锚地系泊、停靠码头、入厂维护检修等),LMU都不会停止工作,除非该船已作报废处理。3.1.3 事故预警与发布
若该船无任何异常,LMU将保持沉默,仅在规定时刻向TMC发报平安信息。若TMC没有收到由LMU定期发来的报平安信息,异地监测人员立即通过其他途径与该船联系,确认原因。
当LMU发现被监测的状态数据跳出报警窗口(如:船倾斜姿态超限、侦测到船体剧烈振动等)或有异常发展趋势、系统自身出现故障(如:断电、某个传感器损坏等)等情况时,LMU立即进入异常事件处理程序,首先在本船发出报警信息,然后通过UHF/VHF电台向邻近的同公司其他工程船发送报警信息(如:当非自航船调遣时,向前面的拖船发出报警信息),同时由GPRS/CDMA/3G或短信平台构成的远程无线数据链路向异地TMC报送本船异常事件报警信息,此时已向3个对象同时发布报警信息,通过这种冗余报警方式保证报警信息被传递出去。LMU工作流程见图4。
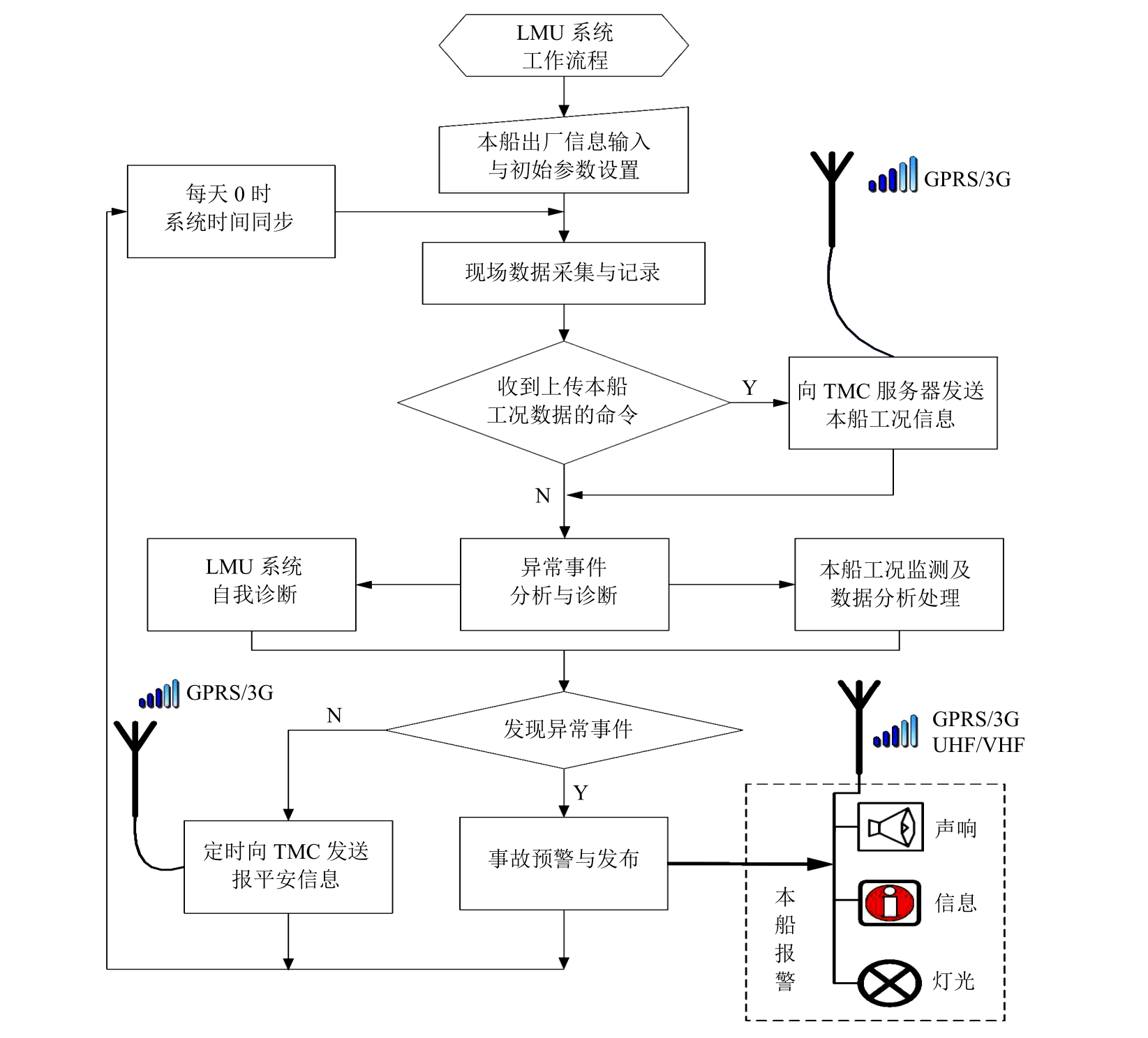
图4 LMU工作流程
TMC是基于地理信息系统(Geographic Information System,GIS)平台的分布式疏浚船队(群)动态信息测控网络系统主机(见图5和图6),其主要功能为:
1) 通过GPRS/3G等无线通信链路与所有LMU构成星形通信网络,遥测现场数据信息。
2) 在GIS电子地图上显示各工程船LMU当前的现场状态信息。图6中深灰色块部分为参数超限报警提示信息。
3) 系统服务器全天24h不间断运行,锁定监测船队所有工程船上LMU的状态,主动发现丢失报平安消息的LMU,及时响应所有LMU发来的报警请求信息,并向相关职能部门发出提示信息。
4) 建立实时数据库,记录、存储、处理各LMU的数据信息,实现船队中船舶工况信息数据资源共享。
5) 为后方专家、工程技术人员开展远程故障诊断分析及技术服务提供现场数据,使其具备现场信息感知能力。
6) 制订事故等级评估和应急事件处理预案,建立事故分析处理专家知识库,使现场船队可即时得到后方专家、工程技术人员及其他资源的支持。
7) TMC将作为提高设备完好率、增强企业处理异常事件或故障诊断及预警能力的技术支撑平台。
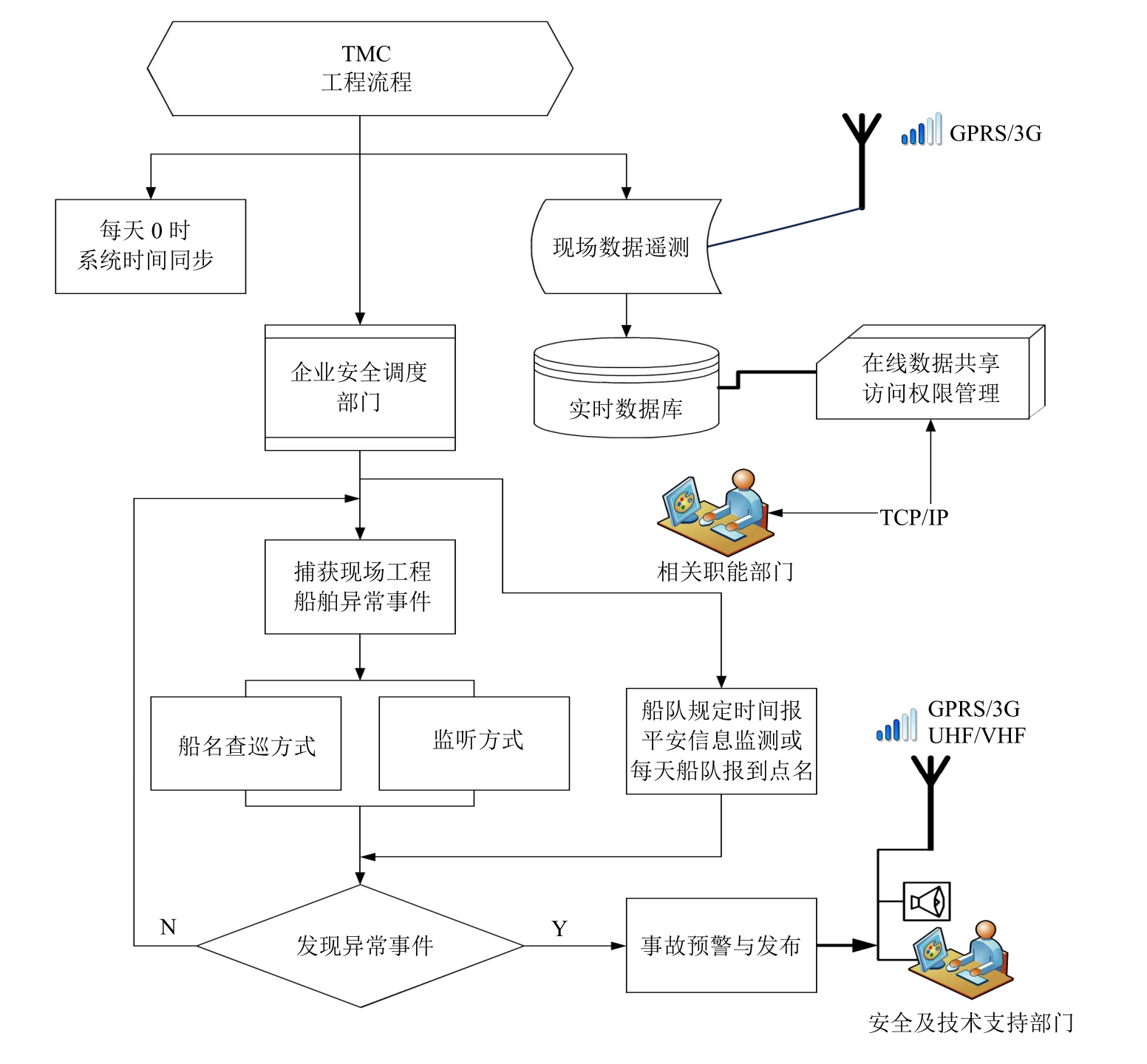
图5 TMC工作流程
通过无线移动网络及通信协议链路,各船的LMU都与TMC的GIS服务器联网,TMC集中管理公司所有工程船,即根据设计制订的系统通信协议锁定每艘工程船,确保其始终受到TMC的跟踪监督,同时各LMU会主动与TMC联系,探查TMC的状态。
通常,若LMU没有发现本船及LMU自身有任何异常情况,该船只在规定的时刻通过GPRS/3G或短信平台及UHF/VHF电台等无线通信网络向TMC和拖船(非自航船调遣时)发送包含该船地理位置坐标的报平安信息(俗称心跳监测),此时TMC的GIS电子地图上将显示所有“心跳”正常的工程船标识。若因故障或其他原因导致通信中断,TMC没有在规定的时间内收到某船LMU的“心跳”信息,则将进入异常事件处理程序。实际上, TMC也工作在无人值守状态,LMU与TMC保持通信协议链路,使二者同时被对方监测,形成本地与异地并存的冗余监控体系,及时发现“工程船舶安全状态在线监测系统”自身的异常情况,增强系统的有效性和可信度。
TMC主要通过2种通信协议方式访问各LMU:
1) 船名查巡方式。为获得各船LMU采集的传感器信息,TMC将通过命令点名要求指定的LMU将本船工况数据传送给TMC。
2) 监听方式。当船队中的某船出现异常事件或到发送报平安信息时刻,LMU将主动向TMC发送报文信息。
系统中配置的UHF/VHF电台是为实现非自航工程船远距离无人值守拖航调遣(如:非自航船调遣时,向前面的拖船发出报警信息)和向邻近的同公司其他工程船发送报警信息而设计的近距离无线通信方式,其与移动通信GPRS/3G构成了冗余报警信息传输链路。
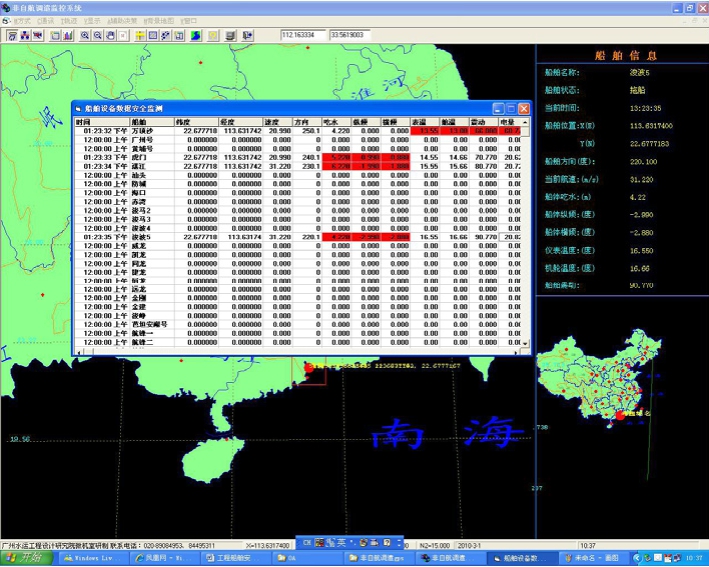
图6 在TMC的GIS平台上显示的各船状态数据
2008年研制“30m3抓斗式非自航挖泥船计算机监控系统”时,在该船的数据采集方案中布置了LMU传感器网络,先期接入GPS、船体姿态和吃水等方面的传感器,并分别开发LMU嵌入式计算机数据采集分析软件、基于GIS平台的TMC远程监测软件和遵循通信协议手册的岸-基网络通信软件,从而构成一个 “工程船舶安全状态在线监测系统”应用测试系统。2009年6月1日,在30m3抓斗式挖泥船从广州调遣到营口拔鱼圈工地的过程中,通过移动通信网络试验测试该船安装的LMU与设在广州公司本部的TMC GIS服务器进行数据交换的性能,此时LMU作为该船的智能值守仪器,向拖船或TMC提供该船的航行状态数据信息,TMC计算机显示画面见图7。
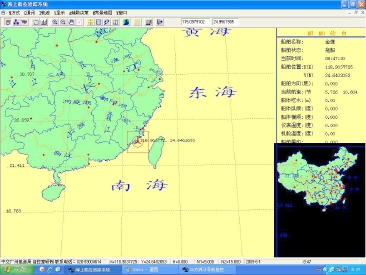
图7 工程船调遣航行位置坐标跟踪画面
此次测试验证了系统的主要功能:管理人员能通过异地计算机远程在线监测工程船海上空间姿态、大地坐标、船体吃水、航向、航迹及声响等数据信息,同时在施工时能获得设备运行的相关工况参数及现场施工数据。实际测试使用结果表明:“工程船舶安全状态在线监测系统”能全天 24h不间断地监测海上工程船,是企业船队生产安全监督的重要保障。
【 参 考 文 献 】
[1] 黄文虎,夏松波,刘瑞岩,等. 设备故障诊断原理、技术及应用[M]. 北京:科学出版社,1997.
[2] 交通部上海航道局. 疏浚工程手册[M]. 上海:交通部上海航道局,1994.
[3] 国家质量监督检验检疫总局,国家标准化管理委员会. 全球定位系统(GPS)测量规范:GB/T 18341—2009[S].
[4] 魏立峰. 单片机原理与应用技术[M]. 北京:北京大学出版社,2006.
[5] 刘思岑 , 周荣福, 魏占玉. 基于MapEngine平台的地理信息系统的开发电脑知识与技术,2006 (10): 8-9.
Research and Development of the On-Line Safety Monitoring System for Engineering Ships
LIU Guo-sheng,TAO Ming,WANG Xiao-feng,LIU Lie-hui,YUAN Zi-hao
(CCCC Guangzhou Dredging Co., Ltd., Guangzhou 510300, China)
Abstract:In order to ensure and enhance the supervision over the safe production of engineering vessels and to raise the equipment intact rate while providing advanced technical supports such as long-term accident pre-warning and remote online fault diagnosis for the enterprises, the “safety status online monitoring system for engineering ship” has been developed. The system is based on the online sharing of the on-site ship operational data and synthetically integrates the mature industrial technologies such as modern sensors, automation and instrumentation, network communication and computers, and consists of shore-based central monitoring server, wireless mobile network and system communication protocol, intelligent ship operational data collecting system and etc. The shore-based central monitoring server can track all of the engineering ships through the mobile communication network and find every potential abnormal incident in time. The result shows that the system plays an excellent role in monitoring’safe production of the ship, the machinery equipment and the on-site construction.
Key words:dredging construction; sensors; wireless communication chain; online fault diagnosis; Geographical Information System (GIS)
中图分类号:TP274;U615.35
文献标志码:A
文章编号:2095-4069 (2018) 03-0071-07
DOI:10.14056/j.cnki.naoe.2018.03.013
收稿日期:2018-01-17
作者简介:刘国生,男,高级工程师,1959年生。1982年毕业于武汉钢铁学院工矿电气与自动化专业,现主要从事船舶自动化工作。